sábado, 3 de octubre de 2015
viernes, 2 de octubre de 2015
jueves, 1 de octubre de 2015
martes, 29 de septiembre de 2015
¿Para que sirve este blog?
Este blog tiene el propósito de indicar a los estudiantes de grado 10 de básica secundaria la construcción de un brazo robotico. Se enuncia la teoría de brazos, roboticos, tipos de brazos y ejemplos de modelos de construcción de prototipos.
Brazo robótico
Brazo robótico
Un brazo robótico es un tipo de brazo mecánico, normalmente programable, con funciones parecidas a las de un brazo humano; este puede ser la suma total del mecanismo o puede ser parte de un robot más complejo. Las partes de estos manipuladores o brazos son interconectadas a través de articulaciones que permiten, tanto un movimiento rotacional (tales como los de un robot articulado), como un movimiento traslacional o desplazamiento lineal.





Tipos de brazos roboticos
Tipos de brazos roboticos
Existen distintos tipos de brazos roboticos
Robot cartesiano: Usado para trabajos de “pick and place” (tomar y colocar), aplicación de impermeabilizantes, operaciones de ensamblado, manipulación de máquinas herramientas y soldadura por arco. Es un robot cuyo brazo tiene tres articulaciones prismáticas, cuyos ejes son coincidentes con los ejes cartesianos
Robot cilíndrico: Usado para operaciones de ensamblaje, manipulación de máquinas herramientas, soldadura por punto, y manipulación en máquinas de fundición a presión. Es un robot cuyos ejes forman un sistema de coordenadas cilíndricas.
Robot esférico / Robot polar, tal como el Unimate: Usados en la manipulación en máquinas herramientas, soldadura por punto, fundición a presión, máquinas de desbarbado, soldadura por gas y por arco. Es un robot cuyos ejes forman un sistema polar de coordenadas.
Robot SCARA: Usado para trabajos de “pick and place” (tomar y colocar), aplicación de impermeabilizantes, operaciones de ensamblado y manipulación de máquinas herramientas. Es un robot que tiene dos articulaciones rotatorias paralelas para proporcionar elasticidad en un plano.
Robot articulado: Usado para operaciones de ensamblaje, fundición a presión, máquinas de desbarbado, soldadura a gas, soldadura por arco, y pintado en spray. Es un robot cuyo brazo tiene como mínimo tres articulaciones rotatorias.
Robot paralelo: Uno de los usos es la plataforma móvil que manipula las cabinas de los simuladores de vuelo. Es un robot cuyos brazos tienen articulaciones prismáticas o rotatorias concurrentes.
Robot Antropomórfico: Similar a la mano robótica de Luke Skywalker que se le coloca al final de The Empire Strikes Back. Se le da forma para que pueda sustituir a una mano humana, p.e. con dedos independientes incluido el pulgar.
Brazos roboticos neumaticos
Brazos roboticos neumaticos
Los brazos roboticos neumaticos son aquellos que emplean a un fluido en su funcionamiento aprovechando sus propiedades incompresibles o que se comporta como tal, debido a que su densidad en el interior del sistema.




Proyecto construccion de Brazo Robotico
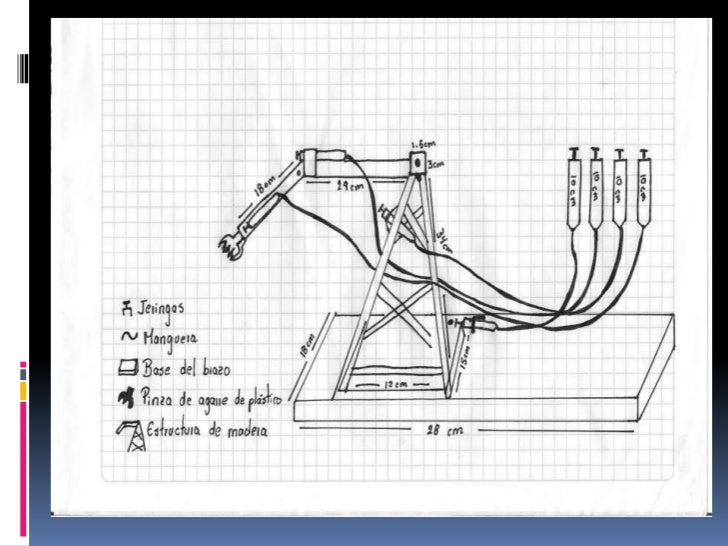
Proyecto: Construcción de un brazo robotico hidráulico
El proyecto se trata de construir un brazo robotico hidráulico, empleando jeringas como impulsores del movimiento.
MATERIALES:
Como materiales se pueden emplear cartón, madera, plástico, laminas de acero, etc.
DISEÑOS:
Se pueden emplear diversos diseños, estos se pueden tomar de internet o diseñar sus propios prototipos.
EQUIPOS DE TRABAJO:
El proyecto se debe trabajar en grupos de 4 estudiantes, todos deben participar activamente y solucionar los diferentes inconvenientes que se presenten durante la ejecución del mismo.
BRAZOS ROBOTICOS PROPUESTOS
MATERIALES:
Como materiales se pueden emplear cartón, madera, plástico, laminas de acero, etc.
DISEÑOS:
Se pueden emplear diversos diseños, estos se pueden tomar de internet o diseñar sus propios prototipos.
EQUIPOS DE TRABAJO:
El proyecto se debe trabajar en grupos de 4 estudiantes, todos deben participar activamente y solucionar los diferentes inconvenientes que se presenten durante la ejecución del mismo.
BRAZOS ROBOTICOS PROPUESTOS







ENLACES
Brazo robótico con sistema hidráulico, cómo se hace
Suscribirse a:
Entradas (Atom)